Hello all,
first of all I want to wish you all a very happy 2016. Hope all your dreams may come true and mine of course.
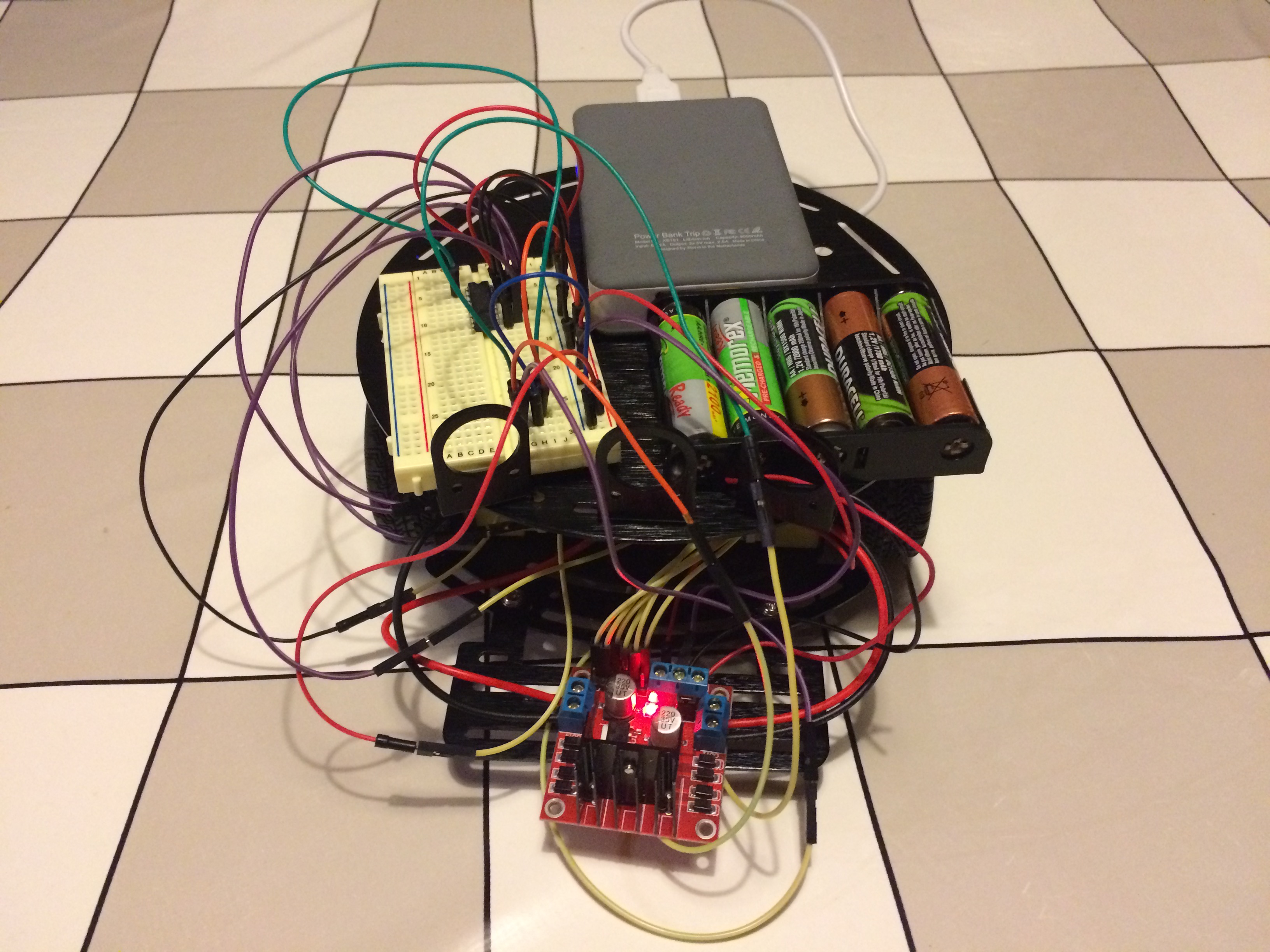
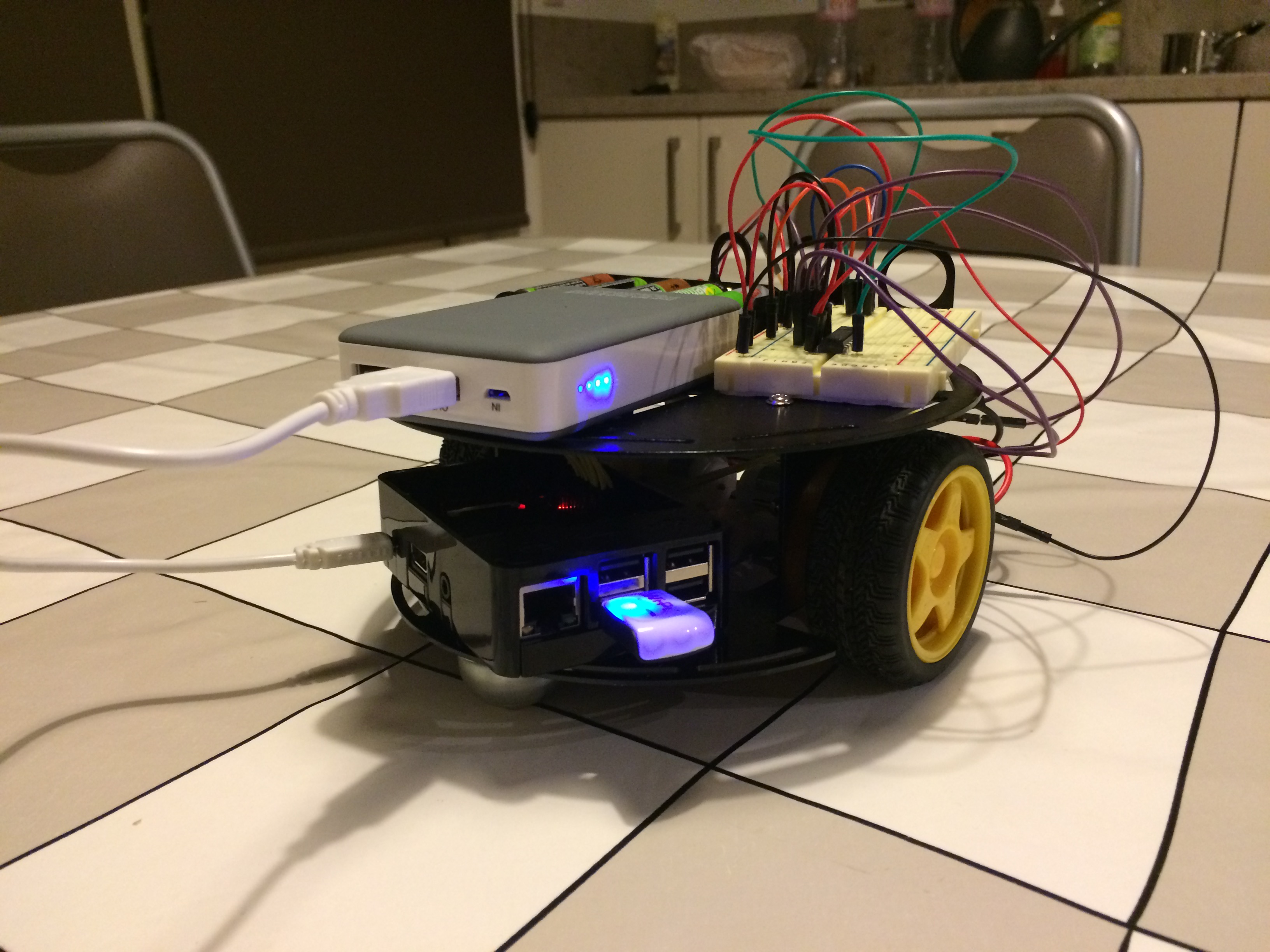
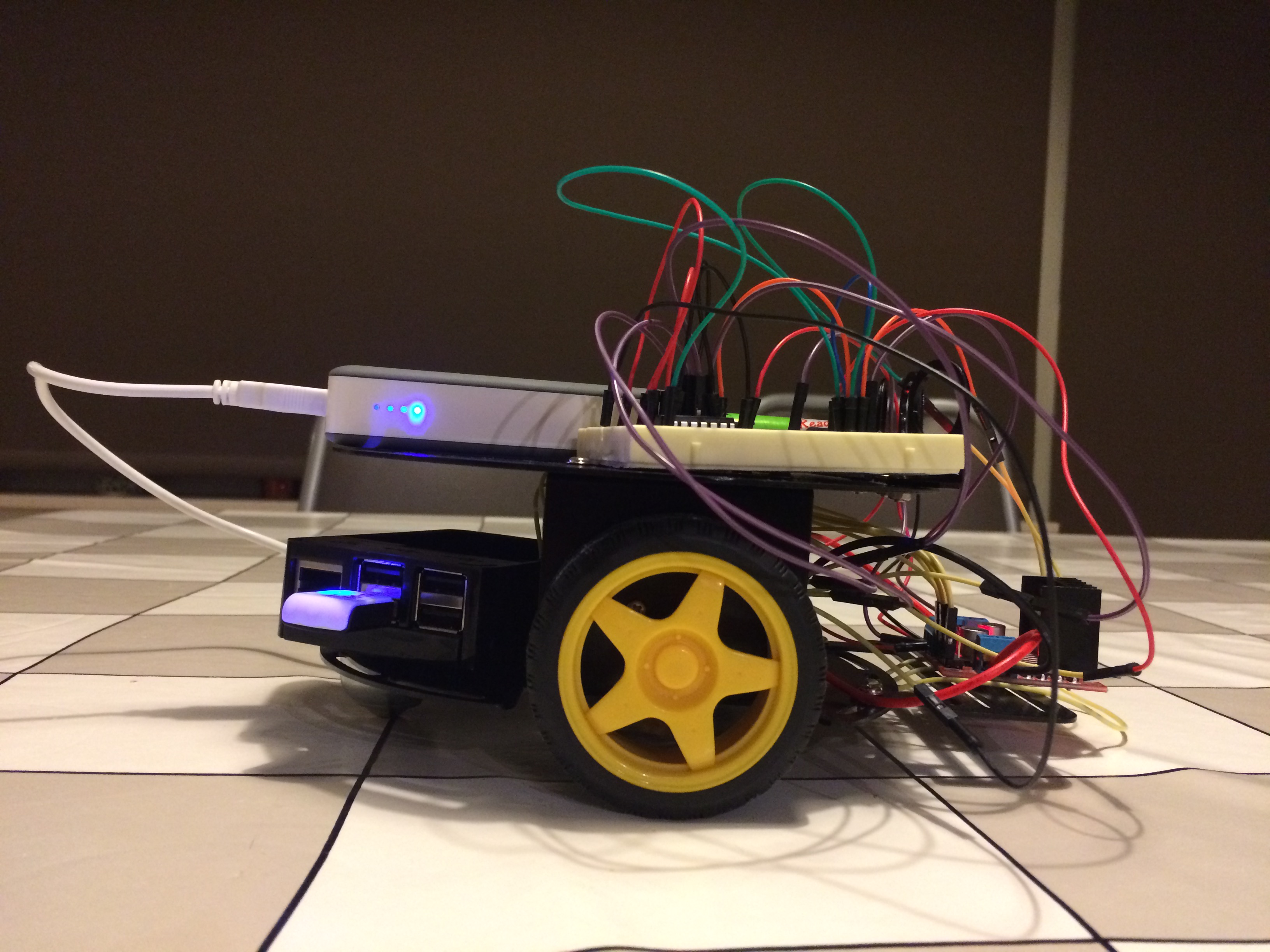
During the Winter holidays I took the opportunity to order a new chassis for the Raspberry Pi Controlled Car. The one I got was not good. Pieces were missing or incorrect and that made it not as expected. The package came from China and was cheap so I won’t complain. It’s sometimes a risk we have to take. Anyway, I did use that chassis to do my first developments and tests so it was not a waste of money. Once the new chassis was there, I directly started setting it up and and let it drive. You can see some pictures here under. I am pretty satisfied I got it working. I made a little interface in JavaFX with a couple of buttons : Forward, Backward, Left, Right and a speed slider. That’s all I need for the moment in the interface. As I said. Very simple. The interface is running on my laptop and it communicates via RMI towards my developments installed on the Raspberry Pi. It is working well although I notice sometimes a lack of responsiveness. Question is if my choice for RMI is the reason for that or not. I haven’t taken the time to investigate if I could use for example a light webservice (REST) to speed up. Anyway, the goal was to let it move and turn … Now I need to do the finetuning when I have time.